NVIDIA Isaac ROS
We integrate the NVIDIA Isaac SDK into ROS 2 applications using the officially supported Isaac ROS stack.
Read NVIDIA Isaac ROSLeopard Imaging is an NVIDIA Elite Partner whose cameras are supported out of the box on the NVIDIA Isaac robotics platform. They provide both 2D (OWL) and 3D (HAWK) cameras that operate over the GMSL interface, allowing for reliable and performant imaging applications. In addition, the HAWK has a built-in time synchronized IMU, setting it up for VSLAM applications.

We integrate the NVIDIA Isaac SDK into ROS 2 applications using the officially supported Isaac ROS stack.
Read NVIDIA Isaac ROS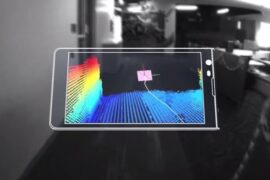
Our VIO outperforms what is available in common libraries and hardware implementations. We implement monocular, stereo and multi-camera VIO solutions
Read Visual-Inertial Odometry (VIO)We create global and local planners that take into account the collision of the robot body with the environment.
Read 2D/3D Collision Avoidance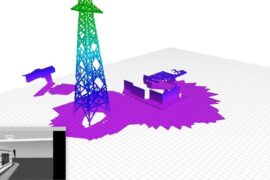
We have more than a decade of experience with 2D and 3D vision frameworks in C++ and Python.
Read 2D/3D Vision and PerceptionComputer Vision Algorithms
Functions and Behaviors