Our Expertise in Real-time Motion Control
Our OROCOS development work of the Real-Time Toolkit (RTT) gave us the leading expertise in Real-time Motion Control for both ROS and OROCOS.
Read Our Expertise in Real-time Motion ControlPosted on 16 January 2023

This article is part of a mini-series on real-time robotics. Be sure to also checkout Part 2: The Kalman Filter and Part 3: The Extended Kalman Filter !

Robotics is a rapidly evolving field, and with the development of more advanced robotics systems and components, there is an increasing need for accuracy and reliability. Both of these can only be achieved if the robot’s sensors follow suit, but sensors being noisy by nature, the need for sophisticated filtering algorithms to process sensor data becomes even more important. One of the most effective and widely used real-time filtering algorithms is the Kalman Filter, but does it apply to Robotics ? In this mini series, we'll explore the Kalman Filter and if it can be used in real-time robotics applications. But first the basics - reading your sensors correctly.
Robotics systems rely heavily on sensors to provide accurate information about the environment and the robot itself. However, sensors are not perfect and often suffer from inaccuracies due to various factors. These inaccuracies can be divided into three main categories: slip, drift and noise.

I wish that was it, but there’s a fourth factor that we first need to control before we can address the above three correctly…
Yes. Let us explain: Jitter refers to variations in the time at which a sensor reading is taken, rather than the value of the reading itself. Take some time to study the graph below: slip, drift and noise will distort our observation of the actual value, but jitter will distort our estimate of when the change happened.
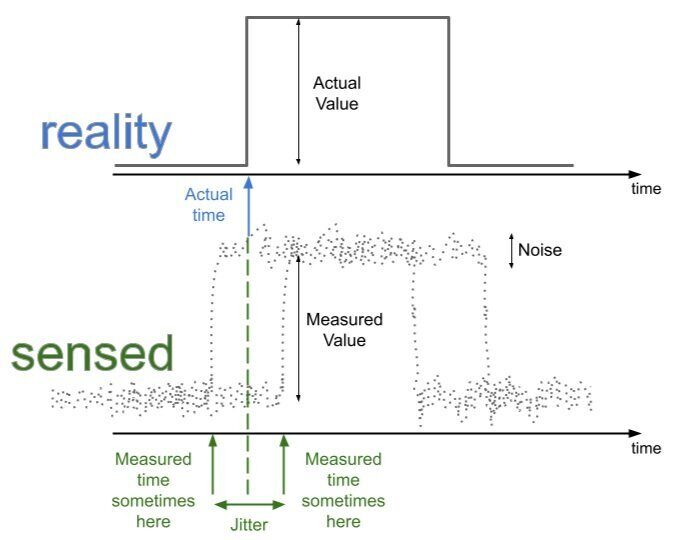
In this context, jitter is a problem for every real-time control algorithm that relies on accurate timing information (hence the term ‘real-time’), as jitter will introduce errors into the control signals that are generated, no matter how good their quality !

Timing is everything !
Example: Imagine you are dribbling a basket ball. Each time the ball is about to hit its peak, you need to push it down again. The timing of pushing down depends heavily on your eyes seeing and hands feeling the ball.
Imagine now that your hands and eyes sense a different time for the basketball’s peak. Even worse, sometimes your eyes see the peak first and then the hands feel it, and next the other way around. Since you can’t get the timing right, the ball will quickly loose height and come down to rest.
These jumps in timing is what we call jitter, and even with perfect eyes and perfect touch, jitter will make you loose the ball. Exactly the same will happen in real-time control systems, the controller will fail to keep the system running.

To address jitter directly, we use synchronization techniques to align the timing of sensor readings with a common reference signal. The most common synchronization techniques in robotics are:
If jitter can not be addressed directly, so measurements are made out-of-cadance, one can revert to measuring the time at which a sensor reading was taken. This requires a setup with three important features:
Eliminating jitter does not eliminate slip, drift and noise in a robotic control system. It only allows us to start working on the real-time data readings. Now let’s explore the open source libraries available to implement real-time data readings.
There are several open-source C/C++ libraries available that you can use to implement a real-time sensor reading. Python is generally not considered a suitable language for implementing real-time control systems, due to the way it is designed and implemented.
Some well known libaries are:
This article touched on the basics of robotics: proper jitter-free real-time sensing. A next step is to process these measurements into a meaningful state, for example the position or velocity of your robot. That’s what we’ll cover in Part 2 !
Continue to Part 2
Our OROCOS development work of the Real-Time Toolkit (RTT) gave us the leading expertise in Real-time Motion Control for both ROS and OROCOS.
Read Our Expertise in Real-time Motion Control
Intermodalics has been at the core development of the Kinematics and Dynamics Library (KDL).
Read Inverse and Forward Kinematics
We are a ROS-native company, standardising all our tooling on the ROS ecosystem. We offer ROS Consulting and best practices for standard ROS paradigms and insights into ROS design decisions its shortcomings.
Read Robot Operating System ROS