Optimizing and Tuning Cartographer maps
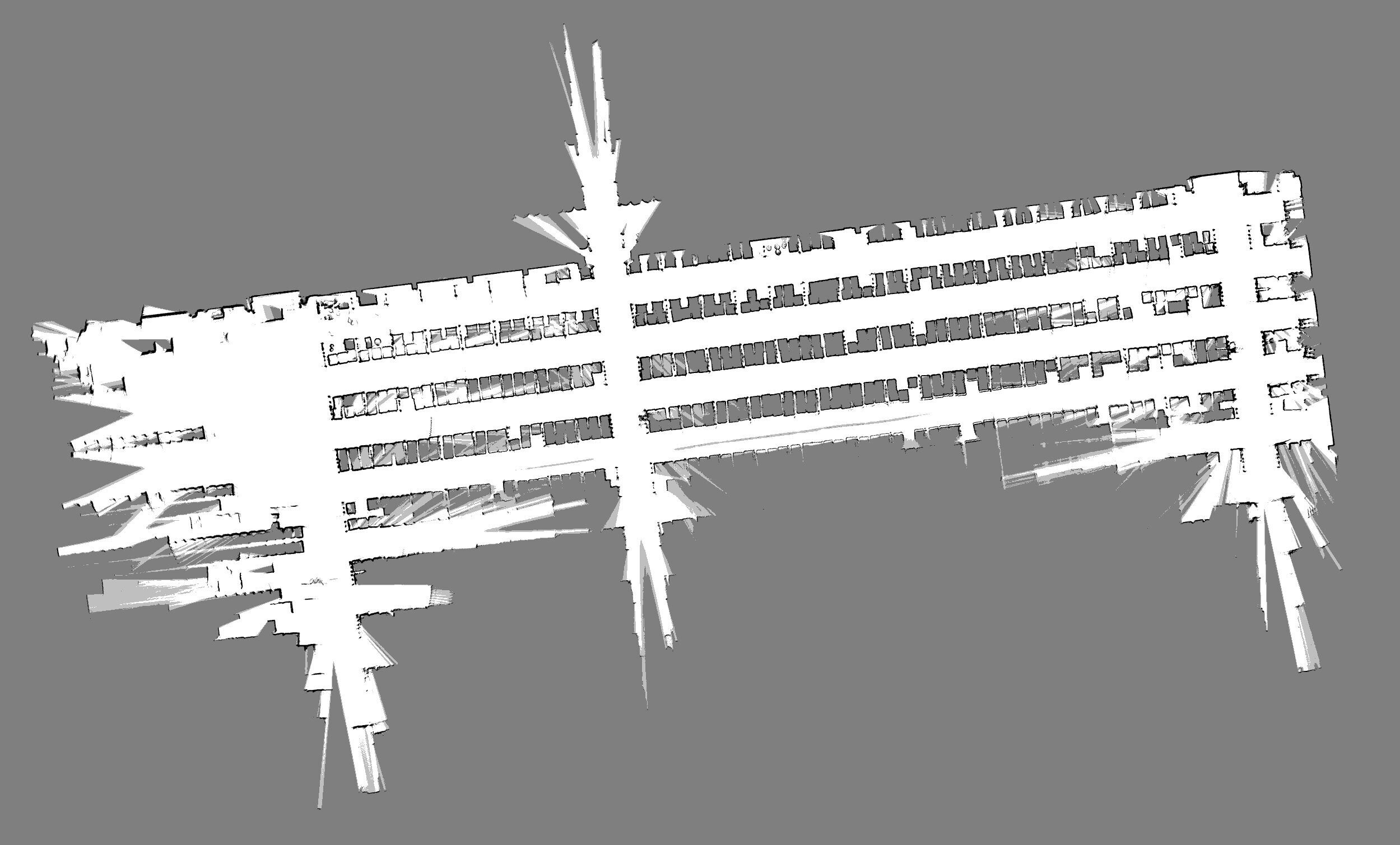
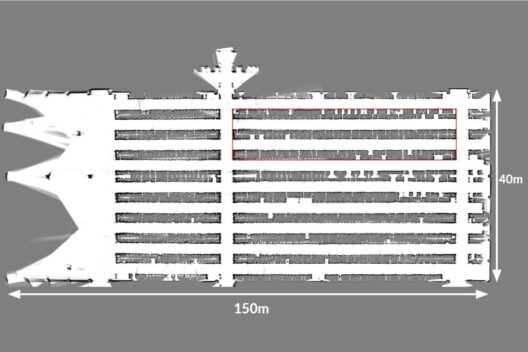
For those looking to optimize and tune their maps, there are a few tips that can help ensure success. Firstly, be aware of thin walls that are squeezed to one 2D line or 3D surface, as these can lead to bends in the map. Furthermore, tune the parameters of loop closure searching in submaps so that it is not too rigorous – otherwise you won't get a complete map – nor too relaxed – otherwise the poses won't match up sufficiently. If done properly, then using Google Cartographer can quickly produce dependable maps.